DJI GO4 3-3. ビジュアルナビゲーションシステム設定
2017年04月21日 | ドローン操縦
ビジュアルナビゲーションシステム設定
Phantom4 Proの醍醐味でもあるビジョンシステム、障害物センサーの各種設定を行います。
Pモード、Sモードの際に有効となり、ATTIモードでは機能しないことに注意が必要です。
また障害物センサーは全方位で完全に機能するのではなく、死角が存在するので
障害物センサーをONにしているから安心と、信頼仕切っての操縦は非常に危険です。
あくまで補助機能と捉えて、十分注意して操縦を行ってください。
phantom4 Proのビジョンシステム・障害物検知
Phantom4 Proはジンバルカメラ以外に以下のカメラ/センサーが装備されています。
- カメラセンサー
- 超音波センサー
- 赤外線センサー
※赤外線センサーが機能するのは初心者モードとトライポッドモードのみ
ビジョンシステムでは超音波と画像データを使って機体の現在位置を把握し、屋内やGPS信号が使用できない環境でホバリングを可能とします。
また障害物センサーとして、近くに障害物がないかを走査しています。
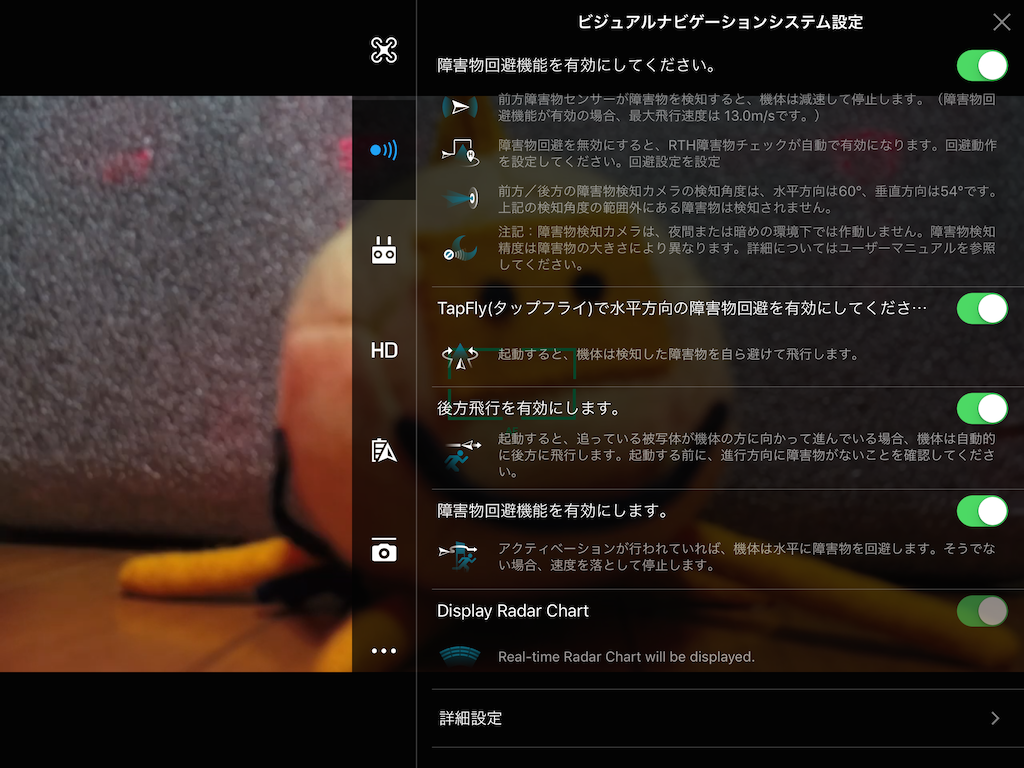
障害物回避機能を有効にしてください。
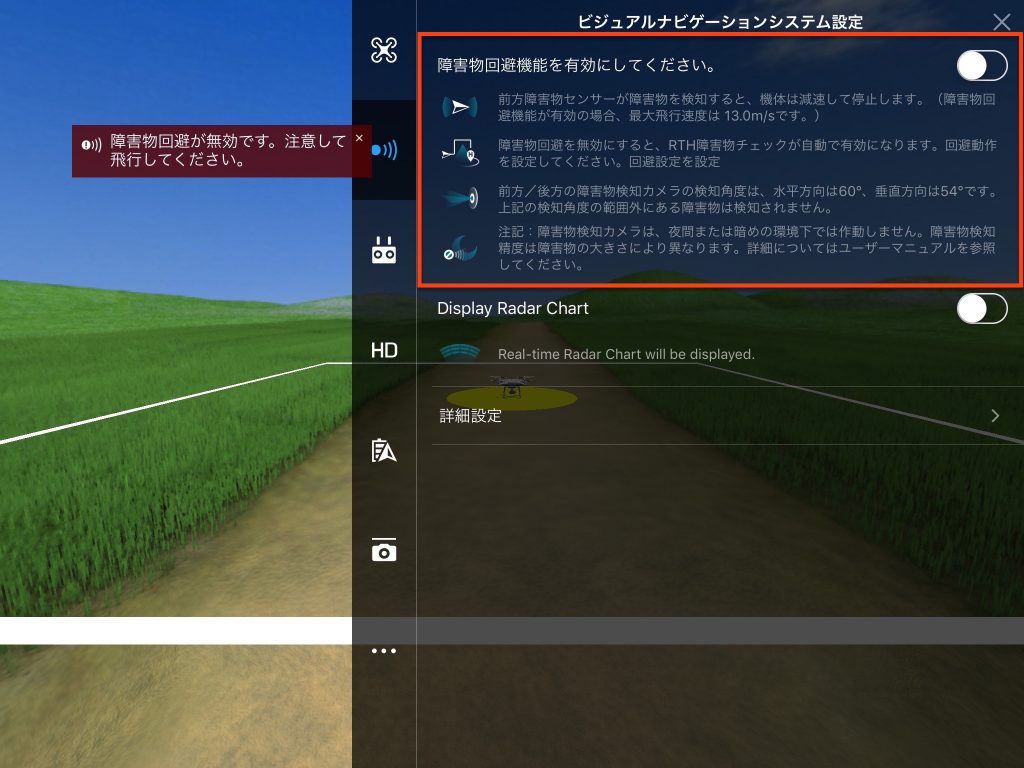
前方障害物センサーが障害物を検知すると、機体は減速して停止します。
(障害物回避機能が有効の場合、最大飛行速度は13.0m/sです。)
障害物回避機能を無効にすると、RTH(Return To Home)障害物チェックが自動で有効になります。
回避動作を設定してください。
前方/後方の障害物検知k前らの検知角度は、紙幣方向は60度、垂直方向は54度です。
上記の検知角度の範囲外にある障害物は検知されません。
中期:障害物検知カメラは、夜間または暗めの環境下では動作しません。
障害物検知制度は障害物の大きさにより異なります。
障害物回避機能をONにすると、以下の設定項目が表示されます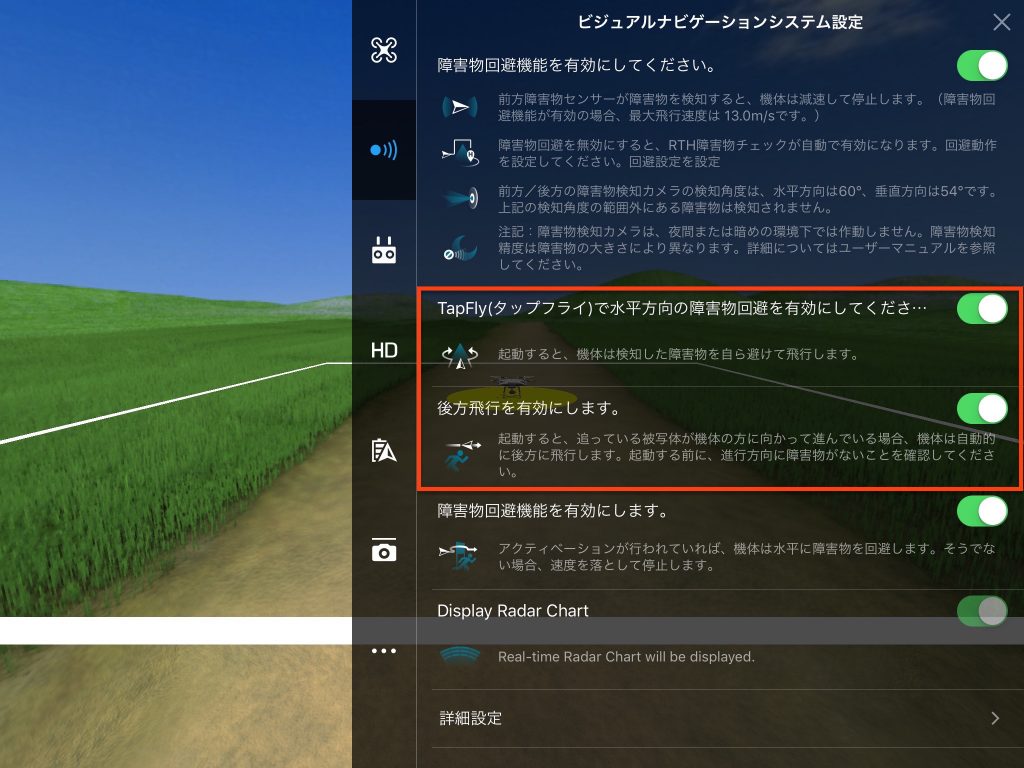
TapFly(タップフライ)で水平方向の障害物回避を有効にしてください
TapFly(タップフライ)はモバイル端末の画面上をタップすることで機体を目的の方向に飛行させることができる機能です。
この機能をONにすることでTapFly利用時に前方に障害物がある場合は、水平方向に自動で移動し、障害物を回避します。
後方飛行を有効にします。
ActiveTrack(アクティブトラック)使用時に機能します。
ActiveTrackとはモバイル端末の画面で動く被写体をマークして追尾できる機能です。
バイクや車、人や動物を自動的に識別することができます。
起動すると、追っている被写体が機体の方に向かって進んでいる場合、機体は自動的に後方に飛行します。起動する前に、進行方向に障害物がないことを確認してください。
障害物回避機能を有効にします。
ActiveTrack(アクティブトラック)使用時に機能します。
この機能がONの場合は機体は水平に障害物を回避します。
OFFの場合は、速度を落としてその場に停止します。
Display Radar Chart
障害物に近づくとビープ音で警告しつつ、画面常にチャートが表示されます。
ビジョンポジションを使用
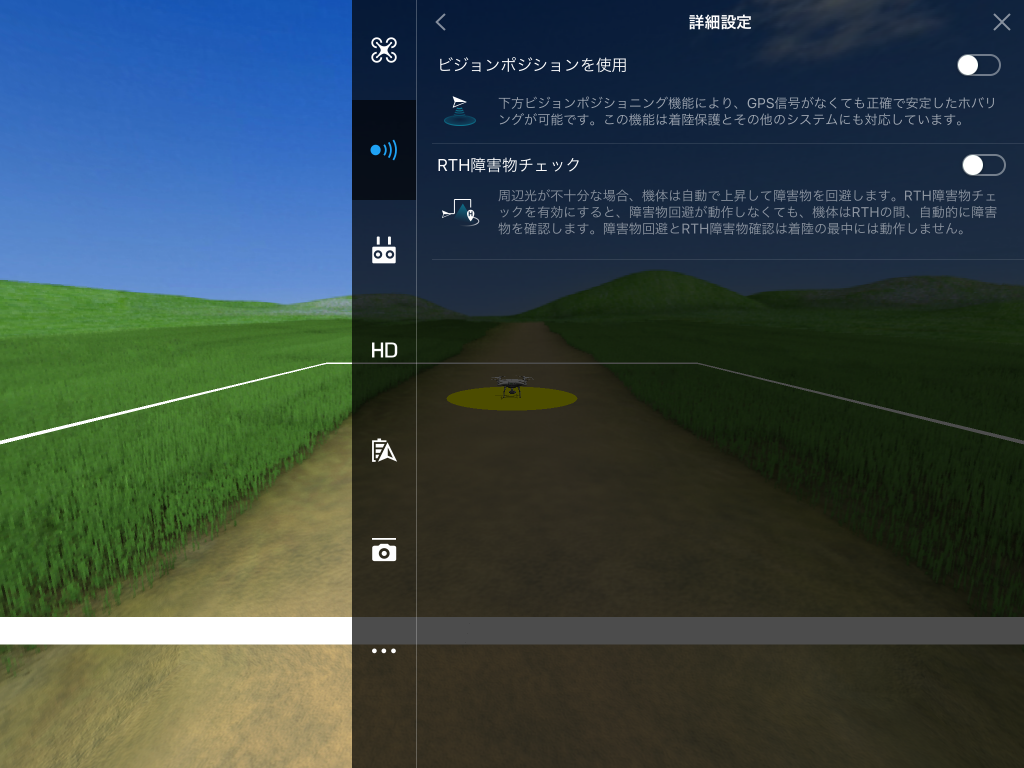
ビジョンポジショ二ング機能により、GPS信号がなくても正確で安定したホバリングが可能です。
この機能は着陸保護とその他のシステムにも対応しています。
ビジョンポジションをONにすることで、以下のRTH時の動作に関わるLanding Protection, 高精度着陸の設定が可能となります。

Landing Protection
RTH(リターントゥホーム)使用時、着陸場所を確認できます。
リターントゥホームは設定されたリターントゥホームの高度で離陸場所に帰還し、離陸場所に戻ると、次にゆっくりと高度を下げ始めます。
この機能をONにすると、高度0.5m程度でホバリングし、着陸するかしないかの確認ダイアログが表示されます。
OFFにすることで、確認ダイアログを表示することなく、そのまま着陸します。
高精度着陸
RTH(リターントゥホーム)使用時,着陸場所を画像で確認し、着陸精度を向上させます。
GPS以外にも離陸時に記憶した着陸場所の画像とを比較し、より正確な場所に着陸します。
RTH障害物チェック
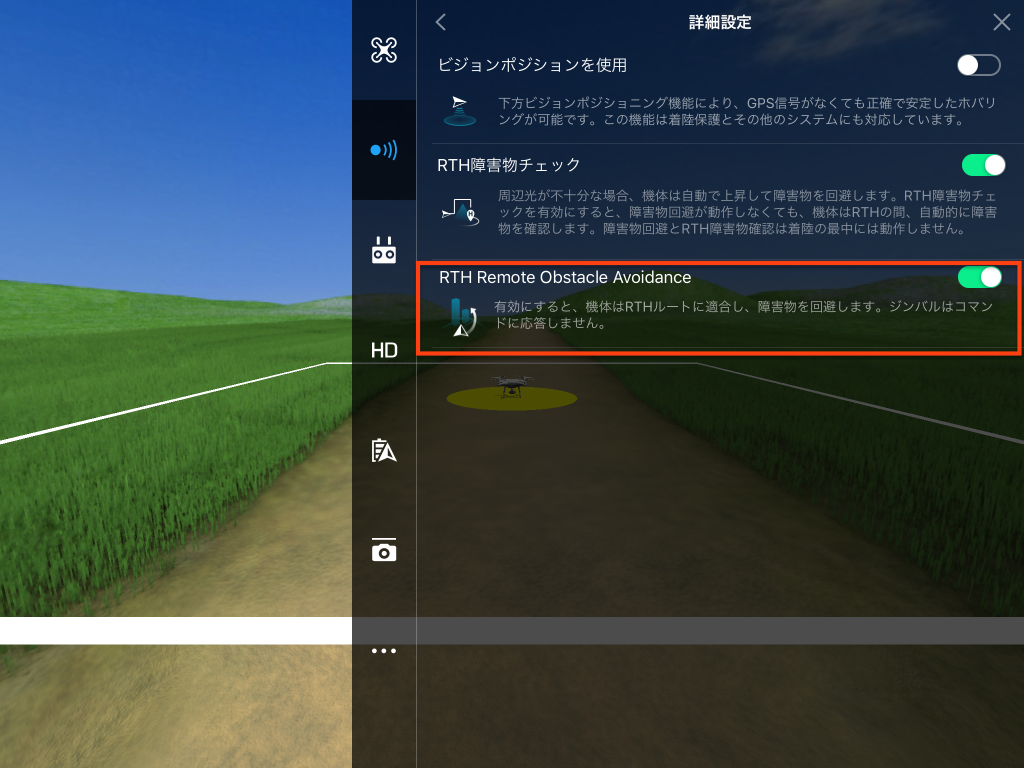
周辺光が不十分な場合、機体は自動で上昇して障害物を回避します。
RTH障害物チェックを有効にすると、障害物回避が動作しなくても、
機体はRTHの間、自動的に障害物を確認します。
障害物回避とRTH障害物確認は着陸の最中には動作しません。
この機能をONにすることで、「RTH Remote Obstracle Avoidance」の設定が可能になります。
RTH Remote Obstracle Avoidance
有効にすると、機体はRTHルートに適合し、障害物を回避します。
ジンバルはコマンドに応答しません。